
Hyomuk Kim
I am a 1st-year Master’s student in Electrical and Computer Engineering at UC San Diego, specializing in Intelligent Systems, Robotics, and Control (EC80). I recently joined the Existential Robotics Lab (ERL), where I am supervised by Professor Nikolay Atanasov.
Click to expand my past journey
Prior to joining UC San Diego, I was a Staff Engineer at the Robot Center of Samsung Research, where I focused on mobile robotic navigation. Working under the guidance of Junghyun Kwon and Aron Baik, I specialized in visual SLAM, 3D localization, mapping, and robust motion planning.
My research extends beyond robotics into applied AI. At Samsung's Global AI Center, advised by Chanwoo Kim, I engineered a Neural Text-To-Speech (TTS) engine—executing the entire pipeline from data collection and model training to C++ deployment. I also contributed to projects involving neural networks for Brain-Machine Interfaces (BMI) and command recommendation engines for AI agents.
Earlier in my career, I built a strong foundation in hardware and product development. I spent 5 years at Samsung's Visual Display Division, validating circuit systems for flagship TVs. Additionally, I led a 6-member team at C-Lab as a Project Manager, spearheading the development of a cross-device content archive platform.
For a comprehensive overview of my experience, please refer to my Curriculum Vitae.
News
- [Apr. 2026] I have joined the Existential Robotics Laboratory (ERL) for research projects!
- [Sep. 2025] I have started my Master’s degree in ECE at UC San Diego!
Research Interests
My long-term research goal is to build safe, reliable, and highly adaptable autonomous systems. Specifically, I am interested in blending classic trajectory optimization and visual SLAM with modern robot learning techniques to enable continuous intelligence improvement in complex, unstructured environments.
- Robot Perception: Visual SLAM, Sensor Fusion, Semantic Mapping
- Motion Planning: Trajectory Optimization (MPPI, MPC), Safe Navigation
- Robot Learning: Deep Reinforcement Learning, Generative Models, Embodied AI
Selected Patents
Throughout my career as a robotics and hardware engineer at Samsung, I have authored and contributed to multiple patents. Below are a few selected works:
- Robot System as a Mothership and Controller of Microbots. Hyomuk Kim, Aron Baik. US20240148213A1, May 2024.
- Robot Device Operating In Mode Corresponding To Position Of Robot Device And Control Method Thereof. Hyomuk Kim, Woojeong Kim, Jewoong Ryu, Mideum Choi, Aron Baik. US20240036585A1, Feb 2024.
- Movable Robot And Controlling Method Thereof. Eunsoll Chang, Youngil Koh, Hyomuk Kim, Mideum Choi. US20230356391A1, Nov 2023.
- Method of Yield Planning for Mobile Robots. Mideum Choi, Hyomuk Kim, Jewoong Ryu, Aron Baik. US20230333567A1, Oct 2023.
Projects
Action Diffusion Policy: Generative Imitation Learning for Manipulation
UC San Diego (Jan 2026 – Mar 2026)
Implemented a Conditional Denoising Diffusion Policy using a 1D Temporal U-Net to solve mode-averaging in explicit Behavior Cloning. Achieved an 81.33% success rate on contact-rich manipulation tasks in the Push-T environment by integrating EMA weight smoothing and Action Chunking.
Tech: PyTorch, Diffusers, Gymnasium, LeRobot
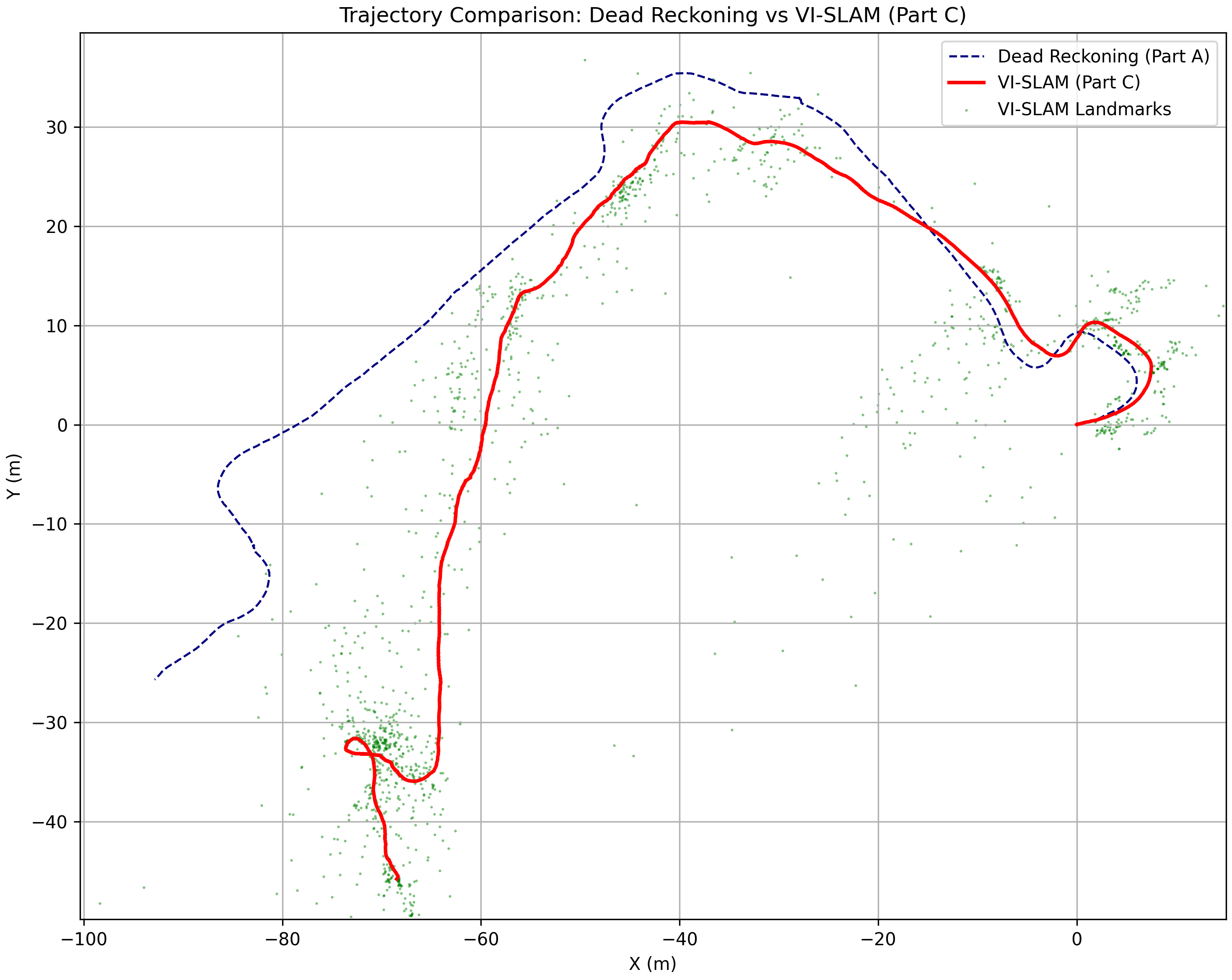
6-DOF Visual-Inertial SLAM Using Extended Kalman Filter
UC San Diego (Feb 2026 – Mar 2026)
Built a VI-SLAM system fusing high-rate IMU SE(3) kinematics with stereo vision using a Full EKF. Optimized the bottleneck via sparse batch updates and analyzed filter limitations against dynamic outliers (e.g., deceptive static objects) in complex datasets.
Tech: Python, Lie Algebra, Stereo Vision
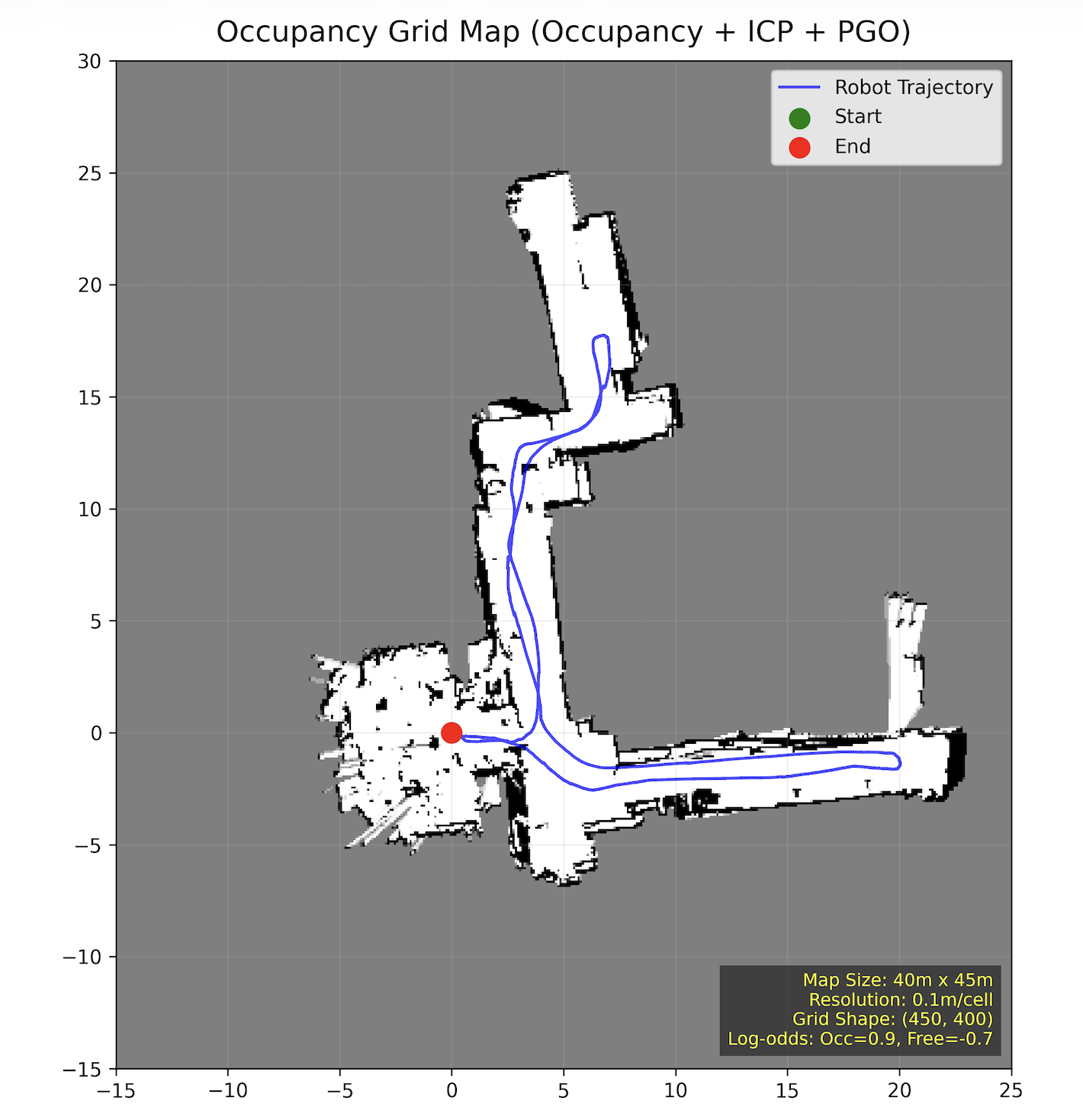
2D LiDAR SLAM & Pose Graph Optimization (PGO)
UC San Diego (Feb 2026)
Developed a SLAM pipeline for a PR2 robot fusing wheel encoders, IMU, and LiDAR. Implemented 2D ICP for scan-matching and robust PGO using GTSAM with Huber M-estimators to successfully reject false loop closures caused by the aperture problem.
Tech: GTSAM, Python, Sensor Fusion
Mobile Manipulation Control Pipeline for KUKA youBot
UC San Diego (Feb 2026 – Mar 2026)
Designed a kinematic software pipeline featuring a task-space feedback controller and an 8-segment trajectory generator for complex pick-and-place tasks. Addressed singularity avoidance, integral windup, and joint velocity saturation.
Tech: Python, CoppeliaSim, Kinematics

3D Orientation Tracking & Panorama Reconstruction
UC San Diego (Jan 2026)
Formulated an optimization-based state estimator on the unit quaternion manifold using Projected Gradient Descent (PyTorch) to fuse IMU kinematics. Reconstructed panoramic images by mapping pixel coordinates to spherical coordinates using estimated camera poses.
Tech: PyTorch, Optimization, Computer Vision